Purpose- This lab is a series of five different experiments that we will be conducting to obtain a targeted variable, revolving around the coefficient of static and kinetic friction. In the last experiment we will use kinetic friction to predict an acceleration of an object.
Experiment One - Static Friction
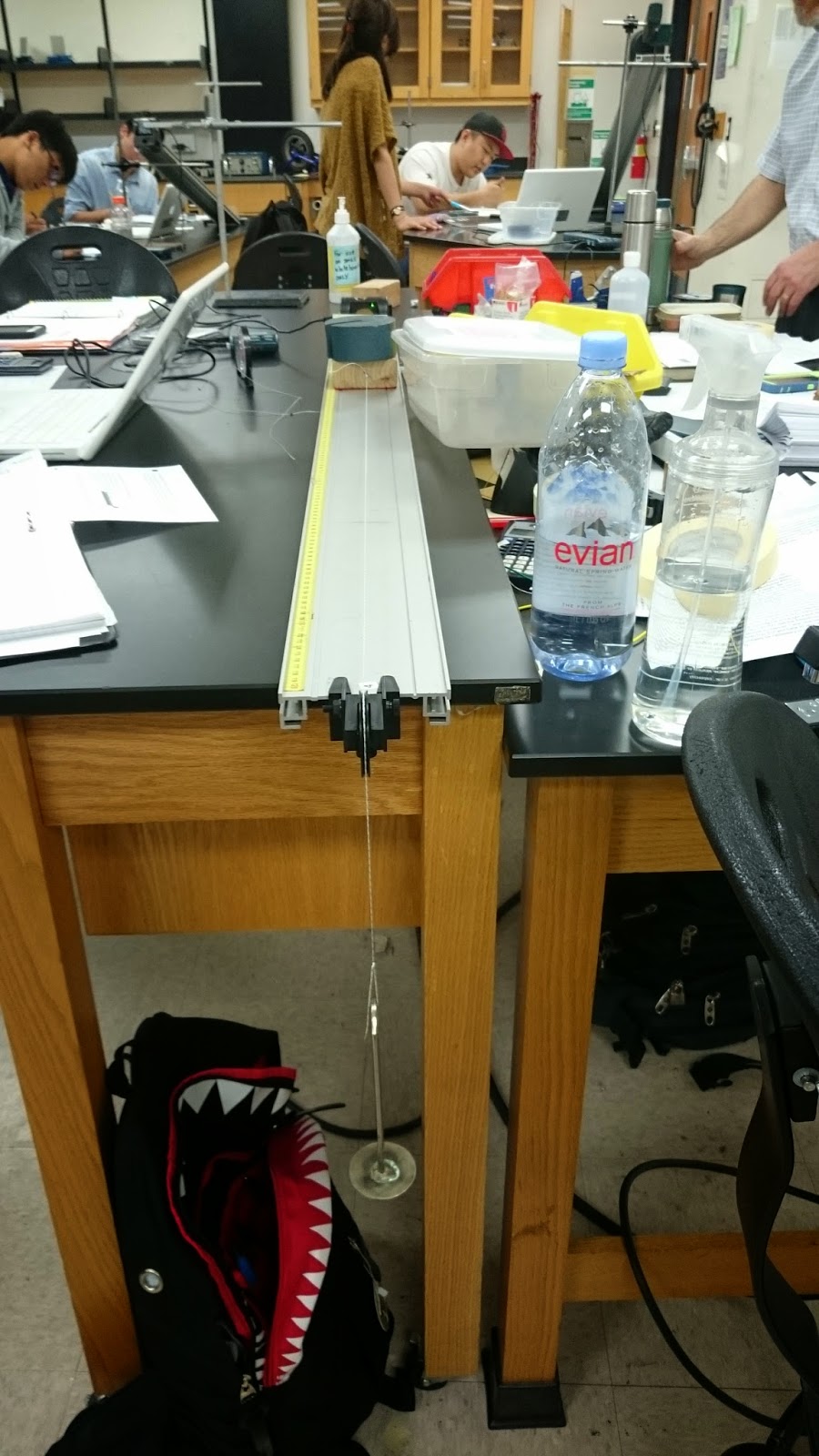
Static friction is a force that is between two objects when they are not moving. In our first experiment we are going to set up a pulley system with a block on a horizontal plane and a cup hanging from the pulley. Both the block and cup are attached to each other keeping in mind that the string is leveled horizontally to the plane of the tabletop.
To find our maximum static friction. We will be adding water into the cup until the block begins to slide. When the block slides we remove just enough water so that the block remains in equilibrium.
We repeat this process by stacking an additional block till we have a total of four blocks stacked.
Data we recorded were the mass of each block and total mass of the cup filled with water.
Note: units are in grams
We then developed a free body diagram to determine our forces for the block and the cup.
Using the technique we can break our net forces of each object into a force in the x direction and force in the y direction.
F=ma but in this case with nothing moving we can say our acceleration is zero.
Block forces in the x direction ends up becoming : T - friction = 0
Block forces in the y direction ends up becoming : N - Mg = 0
Cup forces in the x direction has none.
Cup in the y direction has : mg - T = 0
Essential for this scenario our normal force equals the weight of the block and our friction force equals weight of the cup.
We will input our data and formulas into logger pro to develop a static friction force vs. normal force graph. The graph then requires a proportional fit so that our slope (A) gives us the coefficient of static friction.
Coefficient of static friction = 0.2844
Experiment Two - Kinetic Friction
Kinetic friction is the sliding force between two objects. The force is always opposite from the direction of motion, is proportional to the normal force, and independent of the area or speed of the moving object.
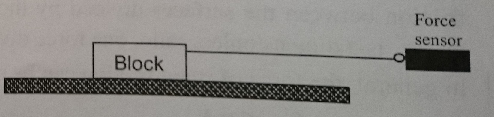
For the second experiment we will be attaching a force sensor to a block(s), keeping in mind to keep the string leveled to the horizontal plane.
We are using the same blocks that we found our coefficient for static friction with. Calibration is in order for the force sensor to work properly. As we collect data we are pulling the block at a constant speed and allowing logger pro to work its magic. We repeat this until we have four blocks stacked.
Image below: Thinking about why the force from each collected data was slightly higher. The reason being is that with an additional block added each trial, the force required to pull the block increased.
Instead of plotting for a slope this time we took the mean from each trial. Keeping in mind to choose a range that best represented a good data at constant speed.
We then took our data and recorded it into a fresh sheet. Using logger pro to develop a kinetic friction force vs. normal force graph. (Normal force is obtained the same method as from the static free body diagram : N=Mg) The slope here gave us our value for the coefficient of kinetic friction.
Coefficient of kinetic friction = 0.2767
Before we move onto the next experiment lets think about our values of coefficients for static and kinetic friction.
Coefficient of static friction = 0.2844
Coefficient of kinetic friction = 0.2767
Does it make sense that our coefficient of static friction is higher than our coefficient of kinetic friction?
Yes is does. Generally speaking to maintain an object at rest would require a bit more force to remain still.
Also because everything on the internet is true, refer to the image below.
Experiment Three - Static Friction From A Sloped Surface
In this experiment we will be testing the blocks capability to remain still on an angled surface.
We begin by placing a block on a horizontal platform. Then we raise the platform just until the block begins to slide down. This will give us a good idea of the coefficient of static friction between the block and the surface.
Once we found the max incline at which the block will remain in equilibrium. We measured the angle between the platform and the table.
Our angle was 15 degrees.
Mass of the block 0.1217 kg.
We drew a free body diagram that modeled the block at its incline. Solving for the coefficient of static friction calculated to equal tan(theta).
Coefficient of static friction equaled 0.2679.
Experiment Four - Kinetic Friction From Sliding A Block Down An Incline
This experiment is similar to the third one. Our hopes here, is to determine the coefficient of kinetic friction as the block slides down the incline.
We will use the same set up as the third experiment but this time have a motion detector at the top of the incline. As we collect data, logger pro will use the motion detector to collect the velocity at which the block slides down and its time interval.
Setting up our velocity vs. time graph in logger pro. We fitted our line to give us a slope which will tell us our acceleration.
Acceleration = 0.1725 m/s/s
Mass of the block = 0.1217 kg
Angle = 17 degrees
This time we have a motion going down which allows F=ma for our net force in the x-direction to keep "ma". Where as in the static portion, since our system was in equilibrium, the acceleration was zero.
For this experiment we solved for coefficient of kinetic friction it ended up equaling
tan(theta) - a / g * cos(theta)
Using this our value yielded 0.287.
Experiment Five - Predicting The Acceleration Of A Two-Mass System
Finally we are going to derive an expression that will predict the acceleration of our sliding block.
In this system we have the same motion sensor on one side and a pulley with a hanging mass. The hanging mass is heavy enough, that when left to nature, will slide the block across the horizontal surface.
Before we run anything through logger pro we will calculate ourselves what we hope the acceleration will be. We will be using the coefficient of kinetic friction we gathered from experiment four, the mass of the block and the hanging object. Deriving an expression for acceleration, we will plug in those values to obtain our acceleration.
We calculated out acceleration to be 0.93768 m/s/s
Next we ran our system through logger pro. Logger pro developed for us a velocity vs. time graph. Fitting the line we found the slope (acceleration) to be 0.8137 m/s/s
Calculated acceleration 0.93768 m/s/s
Logger pro acceleration 0.8137 m/s/s
We have a conflict in values for acceleration. Its about a ten percent difference. Errors and determining values are cause by many things. First issue that we have to take into consideration is the equipment we had available to us. These devices we use to measure our systems are old and cheap. They provide a decent range of certainty but they go so far. If we needed more precise means to measure our system components individually and during motion. As students we would need to have high priced tools that measures more precisely. Being that we are not equipped for it. Having an error ten percent within our values is close enough.
Mainly to take away from these experiments is preservation of knowledge in the steps we used to obtain our targeted values. Which in this case was mainly revolving around the coefficients of static and kinetic friction.








.png)














.png)


.png)